計画書
製作者
奥川裕理恵,千保友里江,野口拓大,Miguel,Dulce
目的
卒業研究の知識としてC言語プログラムの基本的な演習を行ってきた.しかし単なる演習ではプログラムの実用性の理解が難しい.そこでプログラムにより動作するロボットを製作し,システム開発の工程とプログラムの応用の仕方を理解することを目的とする.
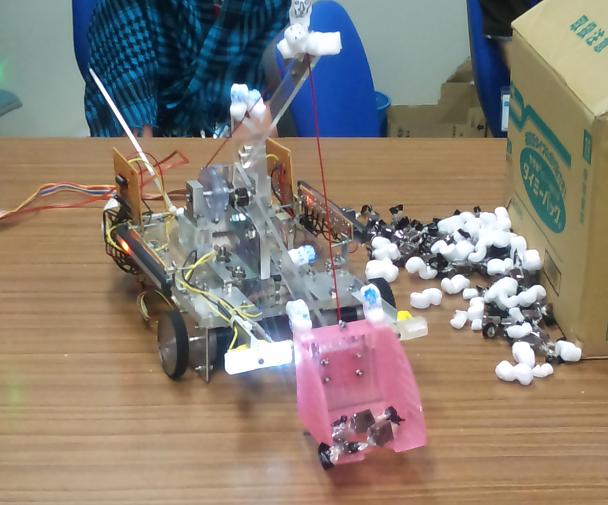
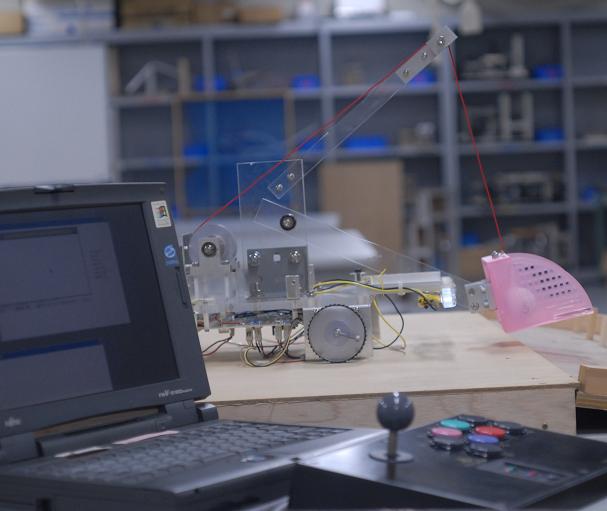
今年度は,前後左右自在に動き,でショベルカーのように対象物を動いてすくってポイするロボットを製作する。マシンのコードネームは「Monkey Hand」!
コンピュータからのパルス信号,正逆制御によってステッピングモータを駆動させ走行、アームの持ち上げをし,落ちているものを拾いあげて目的の場所まで運ぶ。アームの上げ下げのときLEDが流れるように光る。ヘッドライトは常時点灯。
日程
- 6/23-5/29:カタログ請求,部品収集,設計
- 5/30-6/11:ハード組み立て終了(見掛け完成)ソフト完成
- 6/13-6/18:調整,完成
- 7/23:完成祝賀会
- 11/6:てくてくテクノロジー
分担
- ハードウェア班:千保
- 回路班:奥川,Migeal,Dolce
- プログラム班:野口
仕様
本体編
<構成部品>
ステッピングモータ (24V,タイヤ駆動用)×3
ウォームギアKHK×2
歯車(大,小),軸受,タイヤ,糸車,キャスター,バスケットetc...
appearance
 etc...
etc...
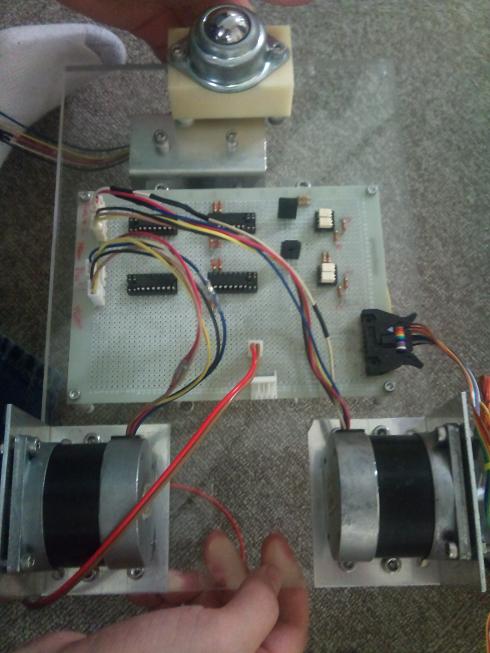
・回路編
MONKEY-HANDの回路図
<メイン回路>
ユニバーサル基盤(大×1,小×4,細長い基盤×2)
モータドライバTB6615PG×3 ダーリントンドライバTD62308BP-1×3
フォトカプラTLP621×6
3端子レギュレータTA7805×4
抵抗: サーモ電飾 180Ω×20, 51kΩ×20
ヘッドライト330Ω×12Ω,10kΩ×4
モータ330Ω×6,3.3kΩ×12,10kΩ×6
コンデンサ22μF
トランジスタ2SC1815×24
デコードカウンター/ドライバーTC74HC4017AP
・プログラム編
仕様
キーボードのキー操作でラジコンのコントローラのようにキーを押している間のみ操作者の思い通りにマシンを動かす
具体的にはカーソルキーでマシンを任意の方向に動かし、←,→で回転、Enterでアームを動かす。
そしてESCで動作を停止させるという仕様である。
<プログラム(一部抜粋)>
#include"MONKEY-HAND.h"
int main(void);
int main(void){
Display *d;
Window w;
・
・
・
while(flg){
XNextEvent(d,&e);
XLookupString(&e,string,10,&key,NULL);
if(key == XK_Up){
while(e.type==KeyPress){
・
・
・
}
}
・
・
・
system("xset r on");
}
駆動プログラム
メイクファイル用プログラム
ヘッダファイル用プログラム
[Gロボット]
 http://www-mm.hm.t.kanazawa-u.ac.jp/
http://www-mm.hm.t.kanazawa-u.ac.jp/
[email protected]