Spec
製作者
黒田健太郎,荒川つかさ,新谷正義,清水琢海,峯村聡,小笠原幹,藤井祥太
目的
卒業研究の知識としてC言語プログラムの基本的な演習を行ってきた.しかし単なる演習ではプログラムの実用性の理解が難しい.そこでプログラムにより動作するロボットを製作し,システム開発の工程とプログラムの応用の仕方を理解することを目的とする.
今年度は矢を発射する固定砲台とその的を製作した.
マシンの名前はメンバーの名字の頭文字から1文字ずつとった.
Kuroda,
Arakawa,
Shinya,
Shimizu,
Minemura,
Ogasawara,
Fujii
日程
2014 04/21 Gロボット分担・テーマ決定
2014 05/31(当初は05/09笑) Gロボット設計終了
2014 06/25(当初は05/28笑) Gロボット完成(実際は7/4現在も完成はしていな
い)
2014 06/26 Gロボット打ち上げ
担当
ハード:黒田,荒川,小笠原
回路:新谷,峯村,藤井
プログラム:清水
仕様
回転テーブル上の発射装置をPCで操作し,矢を発射して的を狙う.
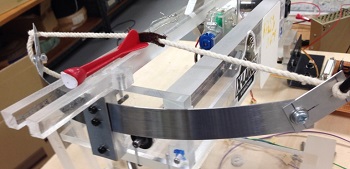
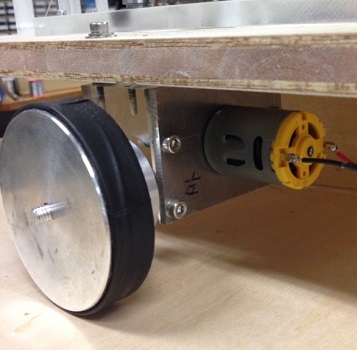
発射装置はボウガンのような形状をしていて,金属の板がしなる時の弾性力を利用している.
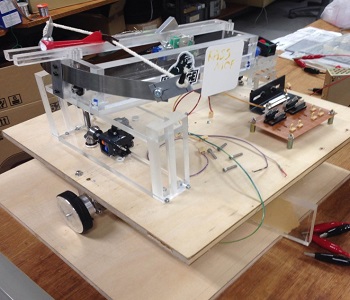
操作できるパラメータは仰角とヨー角,弦の引張量,トリガーの回転量であり,
以下のような操作で発射を行う.
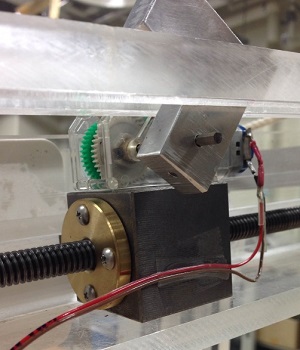
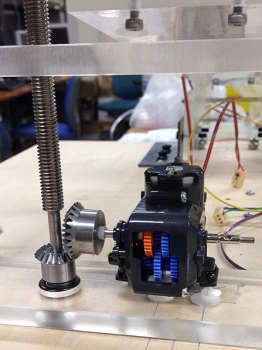
1.モーターの回転運動を台形ネジによって直進運動に変換,トリガーを動かす.

2.L字材(トリガー)を弦に引っ掛け,弓を引く.
3.仰角とヨー角を調整.
4.トリガーを回転させ,発射.
5.的に当たるとLEDが煌びやかに輝き,祝福される.
ハード
(1)発射装置
仕様は上述参照.
<材料>
・購入したもの
矢(おもちゃのダーツセット)
しなる金属板(実はスケール)
台形ネジ
フランジ
傘歯車×2
・研究室にあったもの(過去のGロボからの流用を含め)
DCモーター×4
ギアボックス×3
ボールキャスタ
タイヤ
ベアリング各種
ネジ各種
・加工したもの
仰角変更のネジ
アクリル,木材等のフレーム
トリガー(ジュラルミン)
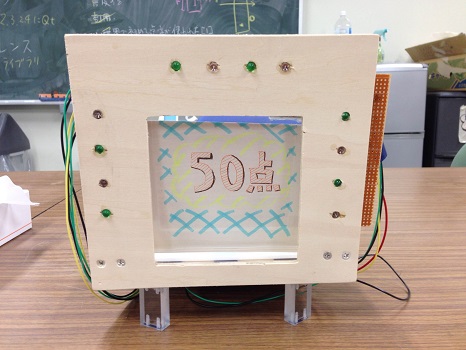
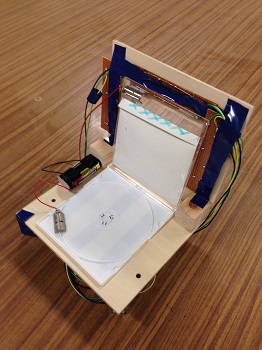
(2)的
木板製の本体とアクリルの足,CDケース,回路から成る.
非常にシンプルで矢が当たると,CDケースが閉じ通電する.そして輝く.
ちなみに的は4種類あり,点灯パターンが全て違う.
<材料>
・購入したもの?
ベニヤ合板(小笠原の手元にあった)
角材(同上)
CDケース
・研究室にあったもの
アクリル
タッピングビス
回路
回路図はレポート参照
(1)モータードライバ
DCモーターを4個使用して,正転,逆転,停止の制御ができる.
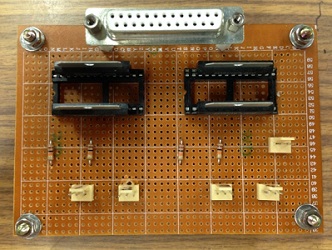
<電子部品>
ユニバーサル基盤
電気抵抗
モータードライバIC:TA7291P
(2)電飾LED
点灯パターンを4種類腰囲した.写真はその1つ.詳細はレポート参照.
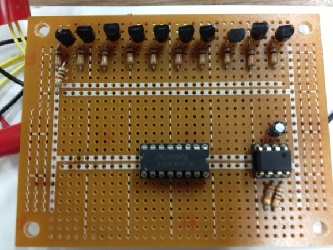
<電子部品>
ユニバーサル基盤
電気抵抗
発光ダイオード(LED)
アルミ電解コンデンサ
トランジスタ:2SC1815
タイマーIC:NE555P
CMOS-IC:TC74HC4017AP
プログラミング
FreeBSDのPPbusを用いることでパラレルポートへの入出力が可能となり,
回路を制御している.
特定のキーを押すことによって各DCモーターを操作することができる.
以下はプログラムへのリンクである.
KASSMOF.c
grobot.h
KASSMOF.mk
[NEXT>>]
[TOP]
 http://www-mm.hm.t.kanazawa-u.ac.jp/
Monday, 28-Jul-2008 15:35:05 JST
http://www-mm.hm.t.kanazawa-u.ac.jp/
Monday, 28-Jul-2008 15:35:05 JST
[email protected]